


专业级无人机建模飞行操作流程
1.设备介绍本次教程以djiM300 RTK为例

图 1-1 M300无人机外观
1.1.1飞机参数
大疆M300RTK多旋翼无人机作为多旋翼无人机代表,已成为行业标杆,因此我们选用这款多旋翼无人机。参数如下表所示。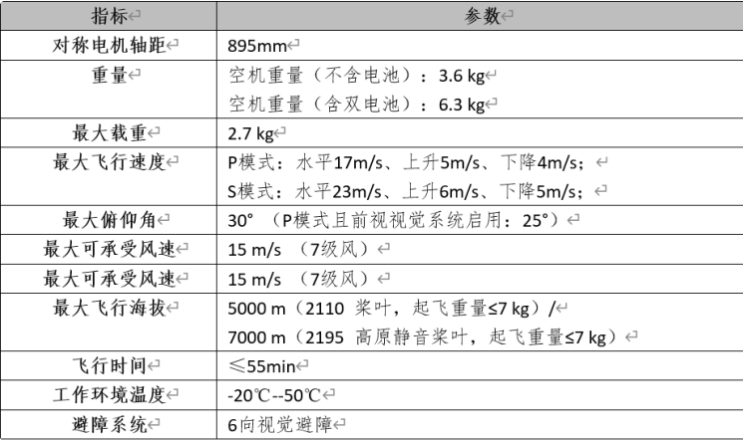
表 1-1 M300 RTK多旋翼无人机参数
1.1.2优缺点
优点:入门容易、操控性简单,安全性高、具备6向避障,并且具有FPV模式,适合快速培训、批量推广。
缺点:续航时间相对较短(25~30分钟/架次),需配备足额电池(8~10组)。
1.1.3适用场景
M300RTK多旋翼无人机作为大疆行业应用标杆产品,适用于城市三维建模、乡镇地形测绘、文物古建复原等航测数据采集。主要用于高分辨率纹理需求(GSD:1.5~3cm)、绝对精度要求高(1:500,水平精度5cm以内,高程精度7cm以内)的模型项目,适用非常广泛。
1.2 M300RTK相关参数
1.2.1飞行参数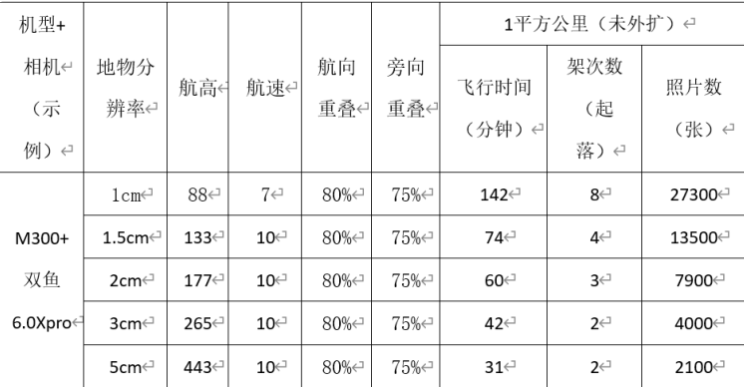
备注: 1. 实际作业过程中,航高往往优于上述表格中数值,例如3cm地物分辨率飞行航高230米,5cm地物分辨率飞行航高400米。2. 实际作业过程中,若楼房高超过了设计航高的二分之一,需要对该楼房区域补飞一层航高为楼房高度2倍的航线。例如设计航高177米,测区内有120米的高楼,即需要对该区域补飞一层航高为240米的航线。
2.作业流程
2.1作业前准备工作
- M300RTK无人机和相机需保持状态良好,随时可作业状态;
- M300RTK无人机电池和遥控器及遥控器电池电量确保充满;
- 倾斜相机各个存储卡空间清空;
- 外出携带电脑电量确保充满;
- 外出携带移动硬盘确保空间足够;
- 该项目架次KML划分完毕(划分方法参考《硬件作业指导书》中架次航线规划),且拷贝到遥控器外置存储卡中,遥控器外置存储卡位置如下图所示:

图 2-1 M300RTK遥控器外置存储卡位置
备注:上述各项必须在昨天前一天的晚上之前准备完毕。
2.2外出作业步骤
- 清点设备装车,开车前往起飞点(注意装车时,飞行器、电池不得挤压、碰撞);
- 到达起飞点后,下车观察周围实时人文环境,确保起飞点周围三米无人员流动;
- 将M300RTK无人机从车上搬至地面平坦处,将机臂打开,拧紧机臂锁死套筒;如下图所示:
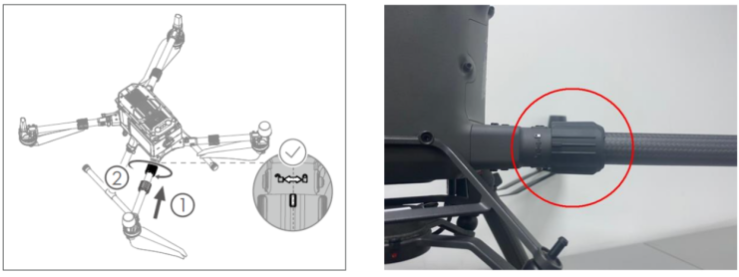
图 2-2 M300RTK无人机机臂锁紧套筒
备注:各个机臂锁死套筒拧至红点对红点即可,切勿将红点拧过对准线一半以上。
4 . 将相机各个镜头擦拭干净,各个存储卡安装完毕,然后将相机安装至M300RTK无人机上;如下图所示:

图 2-2 M300RTK无人机机臂锁紧套筒
5.将电池安装到无人机上,对无人机绕巡一周,分别检查确认以下事项: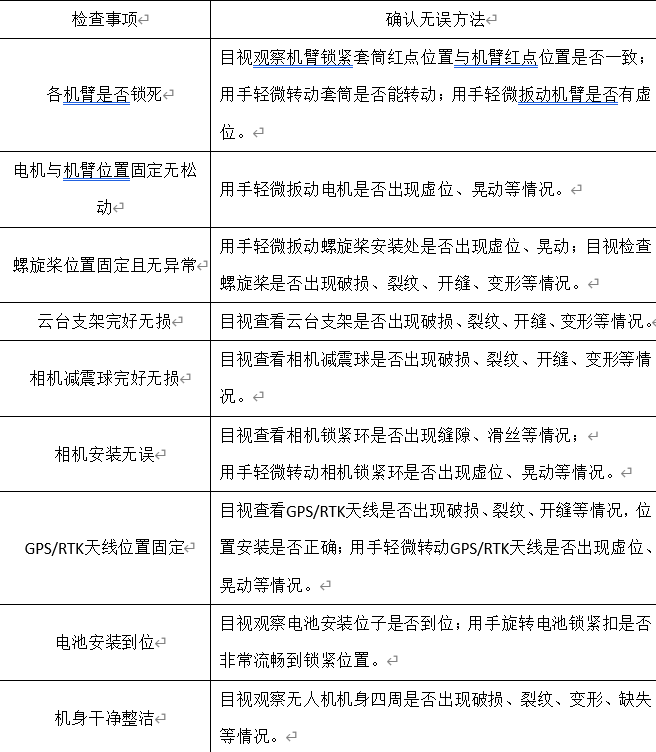
6.将遥控天线打开并开机,然后将无人机电源打开,待无人机自检通过后查看遥控器与飞行器是否连接成功,
7.无人机与遥控器连接成功后点击Pilot按钮,进入控制软件,如下图所示:
图 2-5 遥控器端控制软件页面
8.点击手动飞行,进入页面后查看飞行器各个状态,如飞行器电量、遥控器电量、IMU状态、指南针状态等,如下图所示:
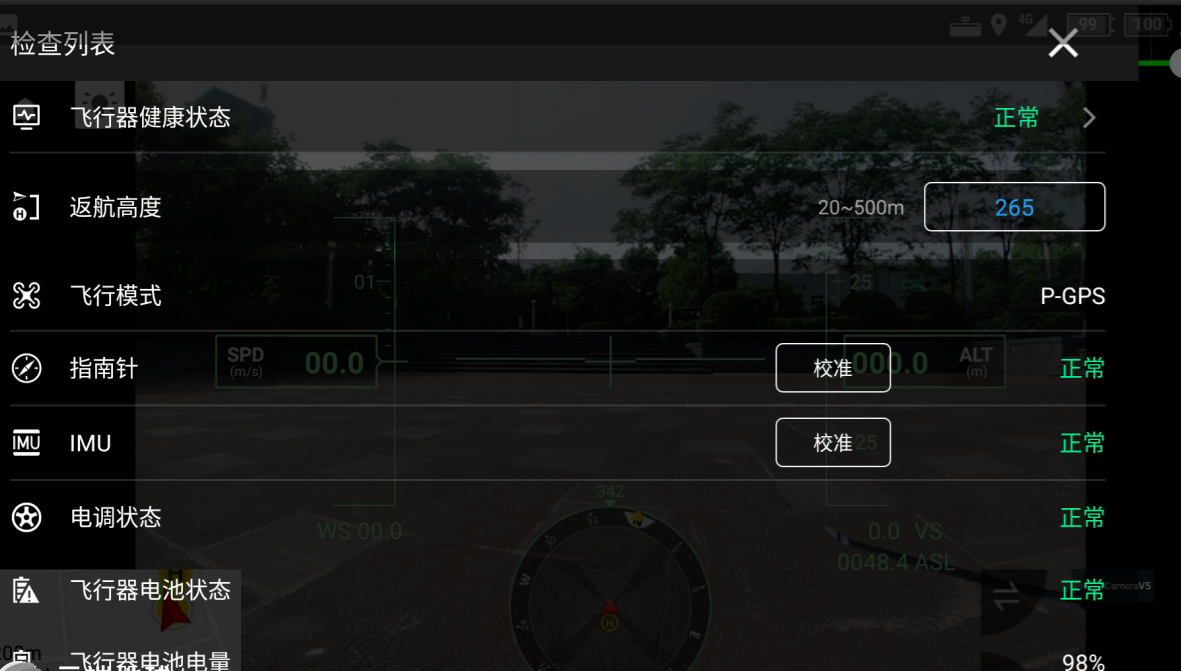
图 2-6 飞行器状态栏检查
9.设置遥控器模式为操作人员常用模式,如下图所示:

图 2-7 遥控器控制模式选择
10.设置好返航高度、限高、距离限制、失控行为等,设置规则如下表: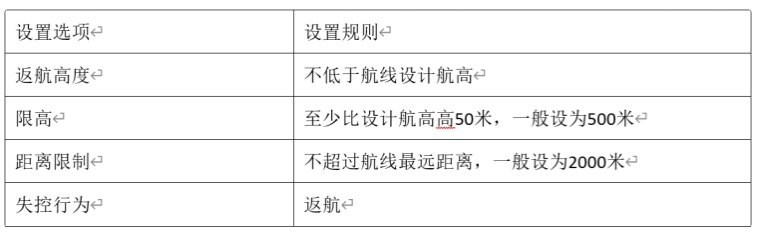

图 2-8 失控行为设置
11.飞行器模式打到“P”模式,将飞行器手动起飞,飞行至离地面2米左右高度悬停,点击重心校准,使无人机开始校准重心,校准完成后,降落无人机至地面,并使油门上锁;如下图所示:
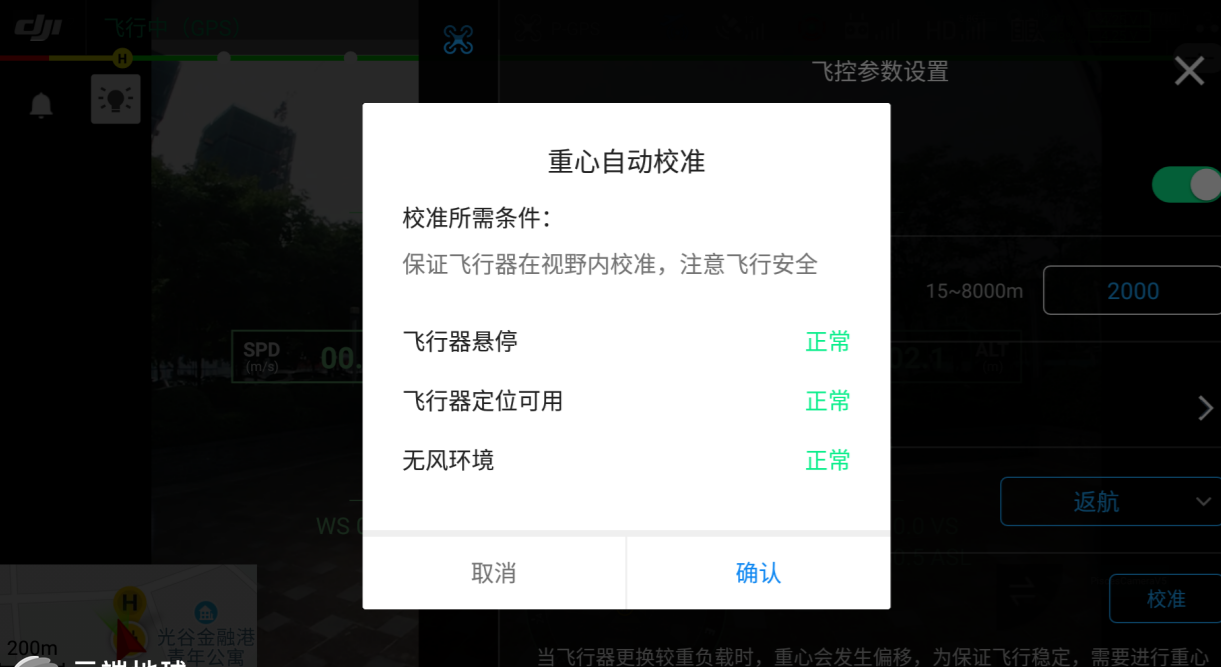
图 2-9 无人机重心校准
备注: A. 无人机在跟换负载设备后,必须重新校准重心;B. 校准重心时,尽可能使无人机在无风环境下悬停。
12. 打开飞行器各项避障开关,设置规则如下表所示: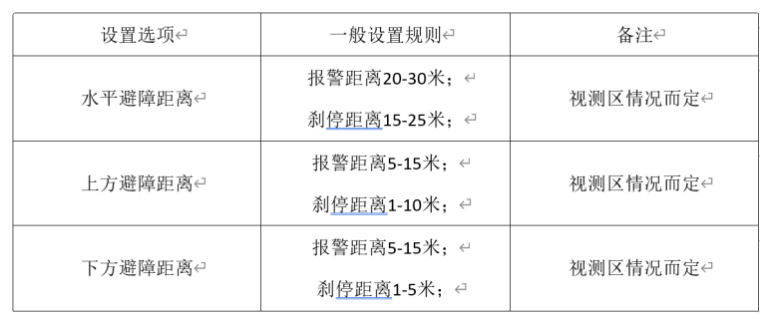
备注:A. 飞行器在进行航线自动飞行时各项避障务必打开;B. 飞行器在起飞和降落时可视现场环境适当关闭水平避障和下视避障,以防止避障生效飞行器触发悬停,导致无法操作飞行器;
13.设置好低电量报警、严重低电量报警,智能低电量返航打开;如下图所示:

图 2-11 智能低电量返航设置
备注: a. 低电量报警功能仅起到报警提醒作用,不做任何动作。b. 智能低电量返航机制为,飞行器自动计算当前位置与当前电量仅够返航至返航点电量后,自动返航,因此在飞行过程中,切勿在触发智能低电量返航后强行取消返航继续飞行。c. 大疆无人机在飞行器电量低于10%时,有可能会触发强制降落功能,此时,遥控器无法控制飞行器的升降动作,可以控制水平动作。
14.RTK设置,除非一些项目特殊要求明确要开RTK功能飞行,一般情况下关闭RTK功能;开启RTK功能后,选择RTK服务类型为需网络RTK;或者选自定义网络,登录千寻cors账号,显示连接成功即可;

图 2-12 RTK功能设置页面
15.按遥控器上面返回键,返回到主屏幕,点击屏幕右边航线飞行,进入到航线飞行页面;如下图所示:
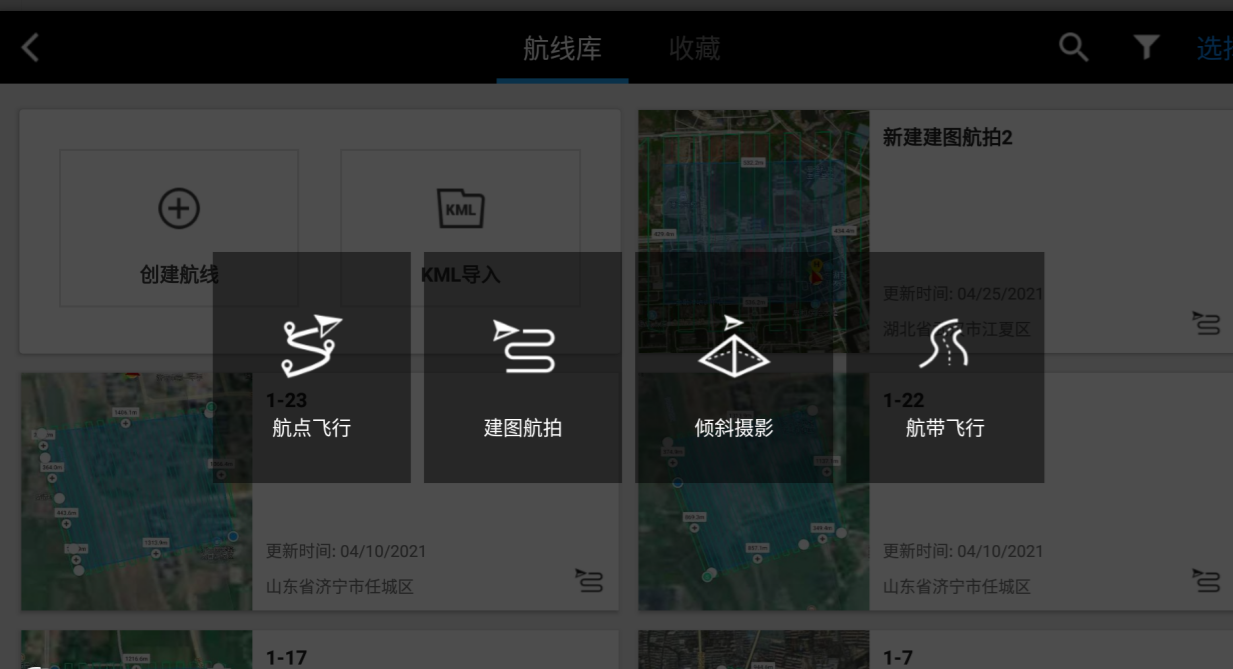
图 2-13 航线飞行页面
16.在航线库页面点击KML导入,选择提前画好的架次KML文件,进入航线规划,具体操作步骤如下所示: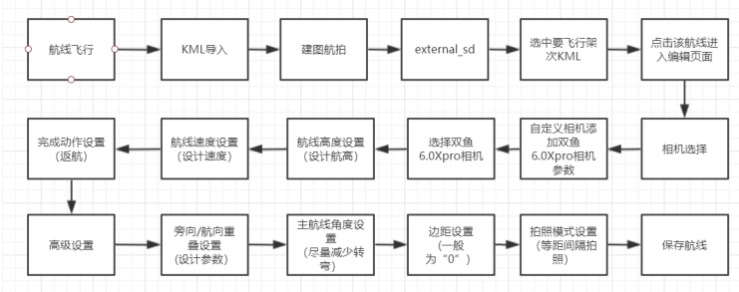
图 2-14 M300航线规划流程图

图 2-15 航线规划示意图-相机参数
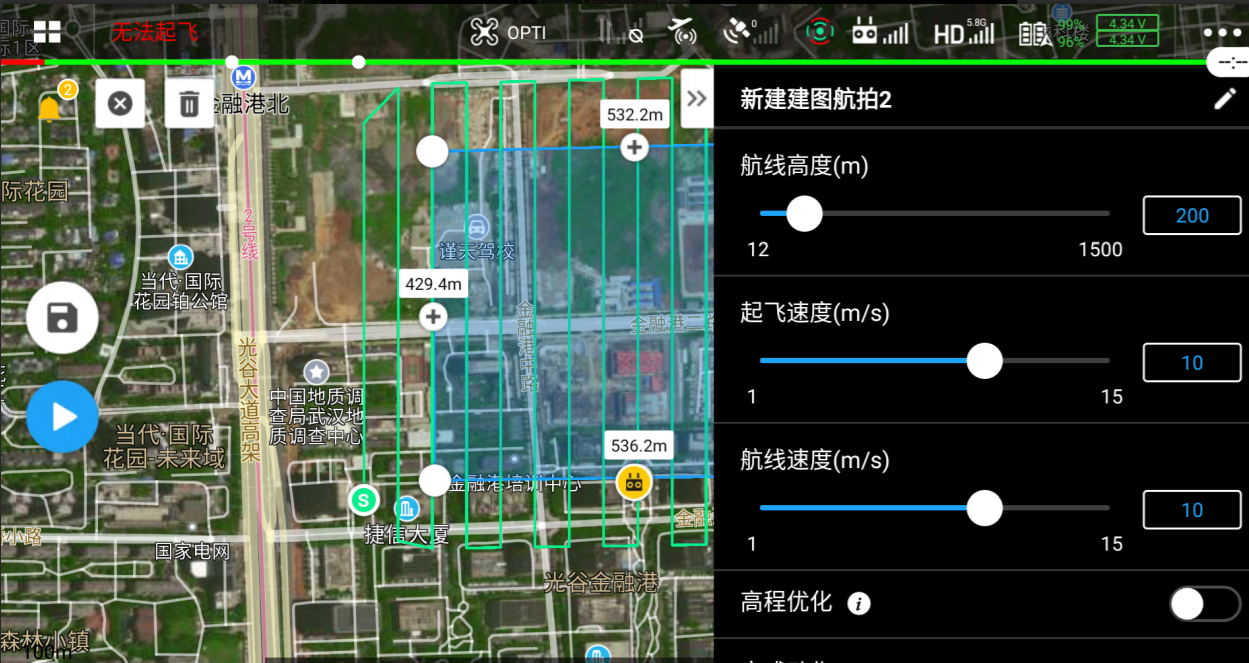
图 2-16 航线规划示意图-高度和速度

图 2-17 航线规划示意图-高级设置
17.打开云台设置中的实时数据显示按钮,如下图所示:

图 2-18 云台实时数据显示
18.点按遥控器上拍照按钮,观察各个相机是否正常拍照,遥控器屏幕上云台页面也可显示拍照数量;如下图所示: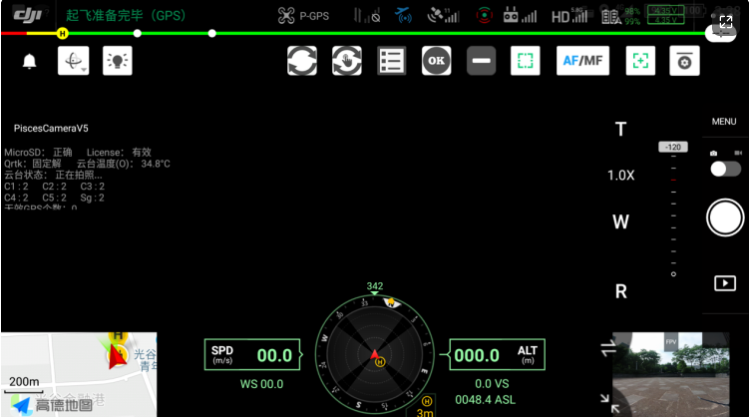
图 2-19 云台页面显示
19.点击航线上传按钮,开始上传航线;如下图所示:
图 2-20 航线上传页面
备注: A. 航线上传页面一定要检查完成动作为自动返航,失控动作为继续执行。B. 航线上传完成后,一般手动起飞无人机至安全范围内后在点击遥控器屏幕中开始执行按钮。C. 若起飞场地特别空旷,无人机起飞点地面平坦,上升航线上无障碍物时,也可直接点击开始执行按钮,让无人机自动起飞。
20.飞行器进入航线自动飞行后,即开始作业,此时须时刻关注飞行器的各项状态,关注对象以下列出:
A. 飞手必须时刻关注无人机姿态、飞行时间、无人机位置等重要信息。
B. 作业过程中,时刻关注无人机搜索到卫星颗数,卫星数量不得低于GPS模式下最低卫星数,一般不低于8颗。
C. 作业过程中,时刻关注无人机飞行高度、速度,是否维持在正常值。
D. 作业过程中,时刻关注相机工作状态,确保相机处于正常工作状态下。
E. 无人机沿航线飞行的航向是否正常。
F. 时刻判断无人机航线上无其他飞行器或障碍物。
G. 必须确保无人机有充足的电量返航。
H. 若无人机发生较大故障、不可避免发生坠机可能性时,要首先确保人员的安全,其次是设备等安全。

图 2-21 飞行中飞行器状态监控页面图 2-22 飞行中航线监控页面

图 2-23 飞行中相机工作状态监控页面
21.当飞行器电池电量达到30%左右时,此时须长按遥控器上返航按钮,以触发飞行器返航,直至安全降落至地面;返航键位置如下图所示:

图 2-24 返航键位置
备注:A. 若该架次航线任务完成,此时飞行器会自动进入返航状态,此时切勿按击遥控器上返航按钮。B. 切勿在飞行器触发低电量智能返航后,取消返航,让飞行器继续飞行。
22.当一组电池飞行结束后,更换电池,重复上述步骤,上传航线后继续作业即可,在每次起飞前,上述第5步关于飞行器的检查必须做。
23.当一天的飞行任务结束后,即可将相机存储卡拔下,将数据拷贝到移动硬盘中,开始进行数据整理和数据质检工作,具体步骤,请参照《硬件作业指导书》中数据整理与质检部分。
文章末尾固定信息

评论