


《无人机航摄系统技术要求》CH/Z 3002-2010
《无人机航摄安全作业基本要求》CH/Z 3001-2010
《低空数字航空摄影测量外业规范》CH/Z 3004-2010
《低空数字航空摄影测量内业规范》CH/Z 3003-2010
《低空数字航空摄影规范》CH/Z 3005-2010
《数字测绘成果质量检查与验收》 GB/T 18316-2008
《1:500 1:1000 1:2000地形图航空摄影规范》GB/T 6962-2005
《无人机数字航空摄影测量与遥感外业技术规范》GDEILE007-2014
首先了解项目基本情况,例如项目所处位置、项目任务内容、项目任务量及测区自然地理概况等。
2.2 前期资料收集
前期主要搜集测图区域的现有地形图、影像资料、测区范围等资料,并对搜集到的资料进行核查, 评价资料的可信度与可利用度。
2.3 项目作业范围
确定合同中所规定的作业范围,最终以KML文件形式呈现。
2.4 项目成果要求
正常情况下无人机航测项目会有如下要求:
- 坐标系统。例如:采用国家 2000 坐标系,平面坐标单位为“米”;
- 高程基准。例如:采用 1985 国家高程基准,高程系统为正常高,高程值单位为“米”;
- 投影和分带。例如:采用高斯-克吕格投影,按 3 度分带,测区内中央子午线为 114°,以中央子午线与赤道交点向西平移 500 千米后的点作为坐标原点;
成图比例尺及地面分辨率,执行《国 家基本比例尺地形图分幅和编
- 号》(GB/T 13989-2012)标准;
到达现场之前在网上搜集测区所在地的气象和地形等资料,利用谷歌地球和奥维地图互动浏览器等工具了解测区地形结构特征和航测飞行危险区域。
3.2.1到达测区之后,对照地形结构特征和航测飞行危险区域等资料实际勘察现场,如地形高差较大区域、高层建筑、高压线路、变电站、人口密集区域等,以及大面积不合适建立起降场地的高山、森林、湖泊等复杂地形;
3.2.2在测区内寻找所有适合建立起降场地的区域及位置并在奥维上做好标记;
3.2.3起降场地选择原则:
(1)不能在狭窄地方起飞;
(2)飞行器上方不能存在电线等障碍物;
(3)起降场地应平坦;
(4)不能在有强风突变的山口等位置起飞;
(5)不能在离高楼太近的位置起飞,会影响飞行器搜星,造成姿态异常;
(6)如需在城区飞行,可以优先选择在楼顶起飞,保证遥控器与飞行器正常通信;
(7)不能在灰尘太大的场所起飞;
4 像控测量
像控测量是在测区内实地测定用于空中三角测量(空三加密)或直接用于测图定向的像片控制点平面位置和高程的测量工作。
空中三角测量是利用航摄像片与所摄目标之间的空间几何关系,根据少量像片平面控制点和高程控制点,计算待求点的平面位置、高程和像片外方位元素的测量方法。像控点是航空摄影测量解析空三加密和测图的基础,其位置的选择、平面位置和高程的测定直接影响到内业成图的精度。
4.1像控布设原则
4.1.1像控点布设时需要综合考虑每个布控点位的清晰度,尽量选择周围环
境空旷,并且具有明显辨识物的附近,易于判刺和立体量测。地势起伏较大的斜坡、 尖锐山顶等,不适宜选择。以高程起伏较小,线状地物交点或平山头等作为点位目标为宜,如斑马线角点、房屋顶角点,如无明显地标,可人工喷油漆或放置标靶布的方式设置地标。
像控点和周边的色彩需要形成鲜明对比,如果周边是深色,则标志以浅色为主,如果地面周边以白色为主,则以喷涂红色油漆为主。

图 边长大于70CM像控标靶布示意图
像控点标志物尺寸应大于70CM,并且不易出现方向性错误,明显显示是标志物的哪一部分。
4.1.2像控点布设要在整个测区均匀分布,像控点在测区内构成一定的几何强度。如果是大面积规整区域,像控可按照左图品字形布点。如果面积很大区域,且精度要求较低时,可适当抽稀测区内部像控。如果是带状测区,布点需要在带状的左右侧布点,可以按照“S”或“Z”字型路线布点。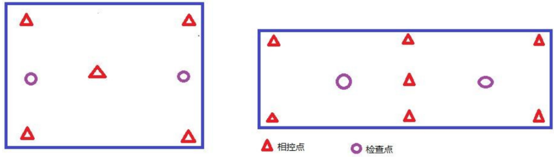
图 像控布设示意图
4.1.3像控点布设的密度,像控点布设首先要考虑测区地形和精度要求。如地形起伏较大,地貌复杂,需增加像控点的布设数量(10%-20%)。很多飞机有RTK或者PPK后差分系统,理论上可以减少地面控制点的数量,可以根据项目测
试经验自行调整。
像控布设密度
4.2像控测量
像控点坐标的采集采用RTK的方法,为保证像控点和航测相片POS坐标系处于同一坐标系内,使用RTK网络差分的方式采集数据的时候需要保证无人机连接的网络CORS接入点、端口要和RTK接收机连接的一致。
数据采集步骤:
(1)开机连接CORS得到固定解后一般不要立即测量,首先检查一下水平残差HRMS和垂直残差VRMS的数值,看其是否满足项目的测量精度要求,正常情况下HRMS不小于0.02m,VRMS不小于0.03m。
(2)每个像控点采集三次,每次3个测回,测点数3个,历元数不少于10个,采样间隔15秒。在采集过程中保证对中杆的气泡始终处于居中状态。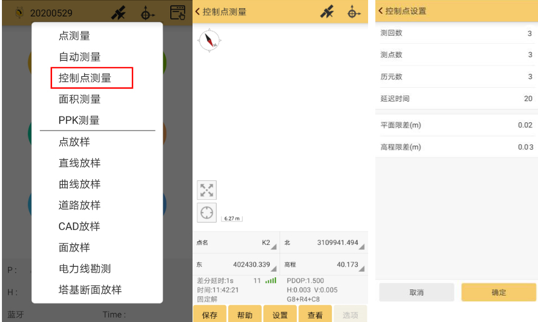
图 像控点测量参数
3)每个控制点采集完毕后,对像控点至少拍摄2张照片,分别为1张近照、1张远照。近照要求摄对中杆杆尖落地处,远照的目的是反映刺点处与周边特征地物的相对位置关系,便于空三内业人员刺点。
图 像控点拍照示意图
4.3像控成果整理
按要求整理好《像控点点位信息表》、《像控点成果表》,见附件一、二。
5 航摄任务规划
5.1标注飞行区域
规划航线之前,利用外部软件(Google Earth、LSV、奥维地图等)查看测区地貌,并进行合理的飞行区块划分、飞行架次安排,优化航飞方案,提升作业效率,避免事故发生。
5.2设计航飞参数
5.2.1航线规划
按照实际需要的地面分辨率进行设计,航线能完整覆盖整个航拍区域。需要据无人机的性能参数,如巡航速度、续航时间、有遮挡及无遮挡环境下可控距离以及航摄地区的地形特征等,规划无人机的飞行航线及规定单架次飞行的最大飞行距离以保证无人机的飞行安全。
5.2.2航高设计要求
航高示意图及公式如下: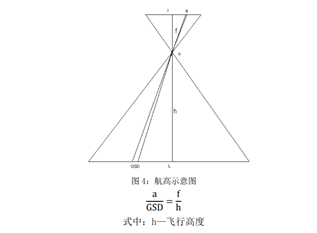
f—镜头主距(mm)
a—像元尺寸(μm)
GSD—地面分辨率(m)
5.2.3重叠度设置
在实际作业中,我们设定的重叠度一般为:航向80%,旁向70%。根据不同环境下的纹理情况,可以适当增大或减小。
在理想情况下,飞机和摄影基准面是保持大致固定的相对高度。而实际作业中,被摄地区建筑的高度,会影响实际的建筑物顶部重叠度。现实中为保证建筑物楼顶有足够重叠,一般会在高差较大的情况下增加重叠度。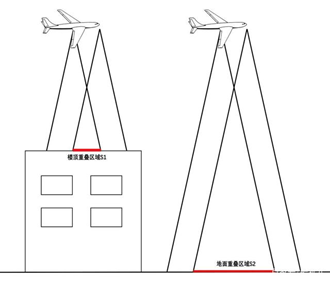
图 不同高度重叠度示意图
5.2.4范围外扩设置
在倾斜摄影任务中,飞行范围需要根据测区范围外扩一个航高。
5.2.5大高差地形分区规划
规范规定分区内的地形高差不应大于1/6航高,分区最低海拔高度+1/6航高高度=分区最高海拔高度。实际操作中,一般按照1/4和1/3航高规划,既可以节约一次飞行次数/成本,又能满足测绘市场规范要求。
5.2.6确定地面分辨率
理想情况下,飞机和航摄基准面是保持一定相对高度的,维持某特定高度即可获取一定分辨率的图。而实际上,被摄地表往往略有起伏的,会导致分辨率低。仿地飞行可以减少由于飞行相对高度不同而带来的误差,但是仍有很多误差无法消除,因此应根据规范要求,结合实际地形,将航高适当降低,飞行过程中按优于规定分辨率的要求进行航飞。
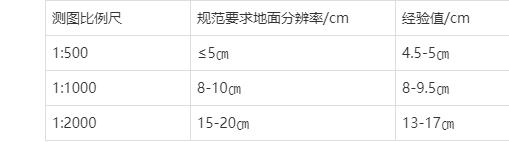
图 不同比例尺分辨率要求
6 航摄作业流程
6.1准备工作
6.1.1 飞行前对本架次使用的设备、材料进行认真清点检查;
6.1.2 航摄现场负责人要严格掌握天气标准,确保航摄影像质量;
6.1.3 飞行前应组织外业工作人员进行航线设计的技术讲评;
6.2飞行前准备
6.2.1 飞机及人员抵达测区后,立即安排设备和材料的试飞试照,为正式作 业做好准备工作;
6.2.2 严格按照飞行检查单的要求进行飞行前检查,确保设备安装和各项设置正确无误;
6.2.3 航摄要求在天气晴朗、低空(1000 m以下)无云雾、风速在8m/s以下、能见度大于5 km、太阳高度角大于45°时进行,起飞前注意避让围观人群。
6.3飞行任务执行
6.3.1 飞行观察
飞行过程中,时刻观察各个飞行数据,注意进入作业航线时的飞行高度、卫星数量、RTK固定解状态、飞行中剩余电量、风向、风速及无人机飞行过程中的俯仰角度。随时保持遥控器与飞行器通信正常连接,如有发现异常,冷静处理,立即返航。
6.4飞行任务结束
6.4.1 飞机降落后,先试拍一张,观察相机工作是否正常,正常则关闭飞机电源,取下相机,用气吹吹去接口和镜头上的灰尘,装入密封箱。
7 质量控制
7.1飞行质量控制
7.1.1相片重叠度应满足以下要求:
(1)航向重叠度一般应为60%—80%,最小不应小于56%;
(2)旁向重叠度一般应为60%—80%,最小不应小于40%。
7.1.2航向覆盖超出摄区边界线应不少于两条基线。旁向覆盖超出摄区边界线一般应不少于像幅的50%,在便于施测像片控制点及不影响内业正常加密时,旁向覆盖超出摄区边界线应不少于像幅的30%;
7.1.3像片倾斜角
像片倾斜角不宜大于2°,个别最大不应大于4°,在同一航线上达到或接近最大旋偏角的像片不得连续超过三片,相机旋偏角不大于9°。
7.1.4航线弯曲度
航线弯曲度不大于3%,避免航线弯曲度过大造成航摄漏洞,如下图所示。
图 航线弯曲度过大造成摄影漏洞示意图
航摄中出现的相对漏洞和绝对漏洞均应及时补摄,应采用前一次航摄飞行的数码相机补摄,补摄航线的两端应超出漏洞之外两条基线。
7.1.5最大飞行倾角
为了保证GPS的数据质量,航摄飞行中尽量保持飞机姿态的平稳,转弯半径要大,飞机倾斜角不得 大于15°,以防止GPS信号失锁。
7.1.6相邻航片的航高差
同一航线上相邻像片的航高差不得大于20 m,最大和最小航高之差不得超过30 m,分区实际航高 与设计航高之差不得大于航高的5%。
7.2影像质量控制
影像质量应满足以下要求:
(1)影像应清晰,层次丰富,反差适中,色调柔和;应能辨认出与地面分辨率相适应的细小地物影像,能够建立清晰的立体模型;
(2)检查单张影像是否存在欠曝、过曝,影像上不应有云、云影、烟、大面积反光、污点等缺陷。如果存在少量缺陷,但不影响立体模型的连接和测绘,也可以用于测制线划图;
(3)确保因飞机航速的影响,在曝光瞬间造成的像素位移一般不应大于一个像素,最大不应大于1.5个像素;
(4)无人机航测采用的数码相机应满足以下要求:
- 相机镜头应为定焦镜头,且对焦无穷远;
- 光圈一般为F5.6-F8;
- ISO一般设置为100-800范围内自动调整;
- 最高快门速度不低于1/1000s。
8 数据处理
8.1数据预处理
8.1.1 原始数据备份
每天飞行结束,首先需要将相机的原始影像数据和原始POS数据拷贝到硬盘,按照日期架次备份好,检查影像数量和POS数量是否一致。
8.1.2 POS数据整理
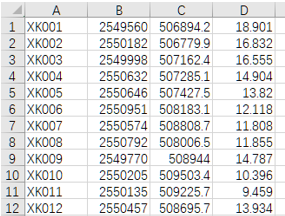
将POS原始数据复制到excel表格中,根据海拔高度值,删除掉地面试拍的POS数据,保留照片号、纬度、经度、海拔高度、俯仰角(Omega)、滚转角(Phi)、偏航角(kappa);
| 第一列 | 第二列 | 第三列 | 第四列 | 第五列 | 第六列 | 第七列 |
| 照片号 | 纬度 | 经度 | 海拔高度 | 俯仰角(Omega) | 滚转角(Phi) | 偏航角(kappa) |
照片号的命名一般按照飞行日期、飞行架次号、照片序号以及照片格式组成,例如:2022021801_0001.JPG(2022年2月18日第一个架次);
8.1.3 影像数据整理
首先按架次将原始影像放好,删除地面试拍照片,用文件批处理工具将照片名称修改成与POS照片号一致;
8.2正射影像成果生产(以PIX4D为例)
8.2.1 新建文件夹
在新建文件夹里面创建文件两个文件夹,分别命名为DOM和Photo,用于存放正射影像工程文件以及用于生成正射影像的可见光影像。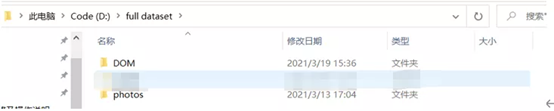
8.2.2 新建项目
8.2.3 设置项目名称及路径:注意项目路径,不能出现中文,项目名称不用中文;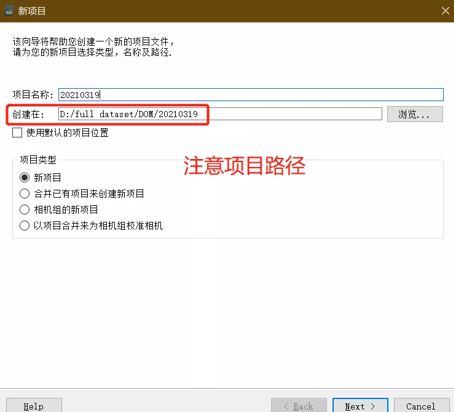
8.2.4 添加图像
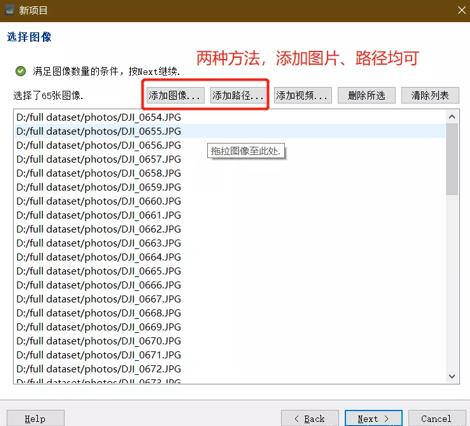
8.2.5 设置图片属性
编辑相机型号,根据厂家相机检校报告填入检校参数,不同类型相机需要重新建立参数数据模板。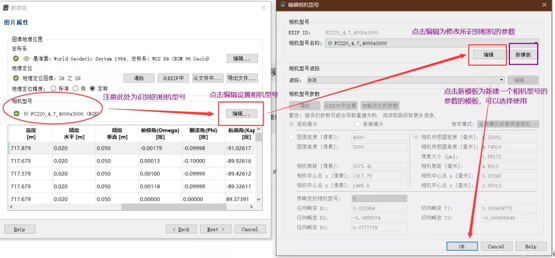
调整水平垂直精度(此处由于大疆无人机拍摄照片自带坐标,会自动导入坐标数据,只需调整水平和垂直精度即可)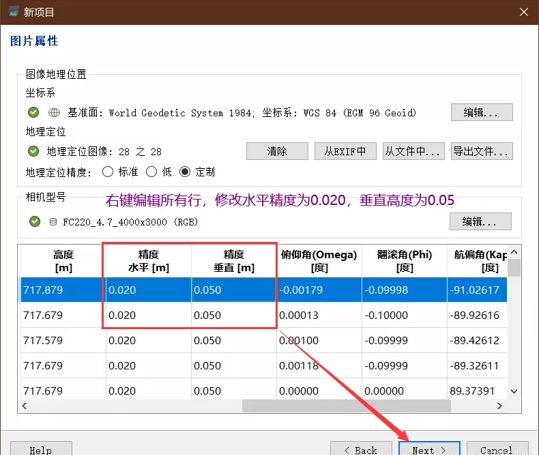
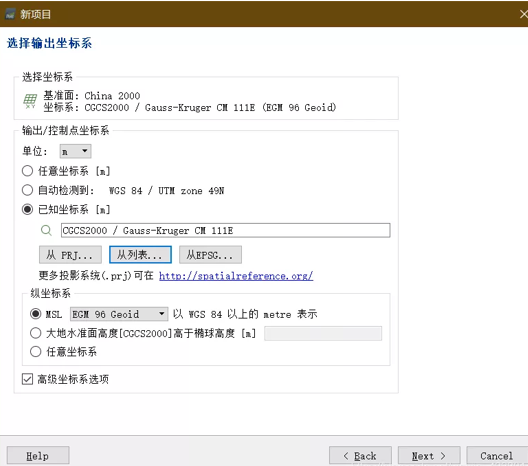
8.2.6 选择输出坐标系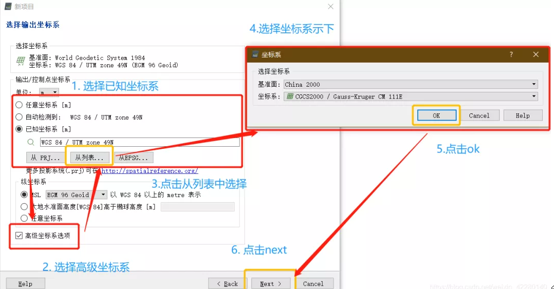
如果是自定义中央子午线,可以在ArcGIS里面自定义坐标系,导出PRJ投影文件,加载进去。
8.2.7 处理选项模块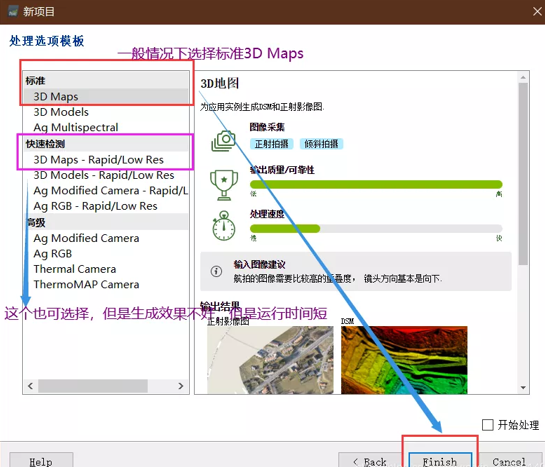
快速检测可以用于外业作业中及时检查数据有无错误,空三速度较快。
8.2.8 进入主界面生成航摄图点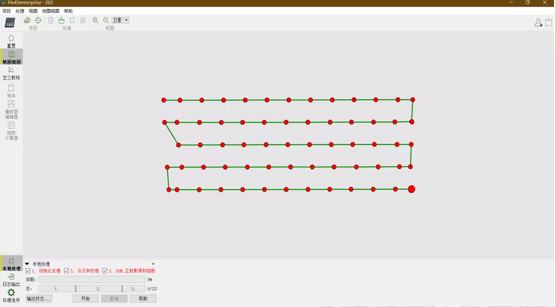
8.2.9 选项设置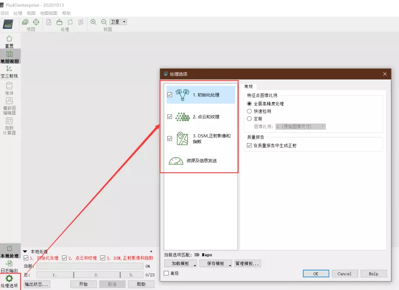
在处理选项中分别设置初始化处理、点云和纹理、DSM,正射影像和指数,其中第二步点云和纹理处理速度很慢,一般项目要求不高时可跳过。
8.2.10 像控点设置
有像控点就设置,没有也无妨,也可生成数字正射影像,不过精度略低。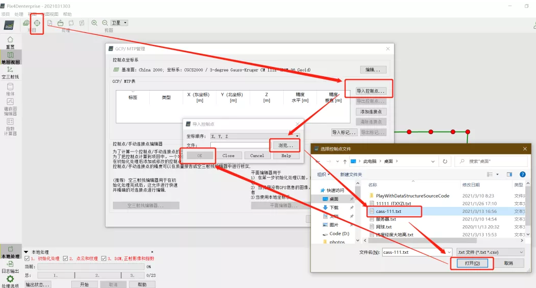
选择刺点按钮(GCP/MTP管理),点击导入控制点,浏览由手簿导出的数据文件,打开后点击ok,出现如下界面: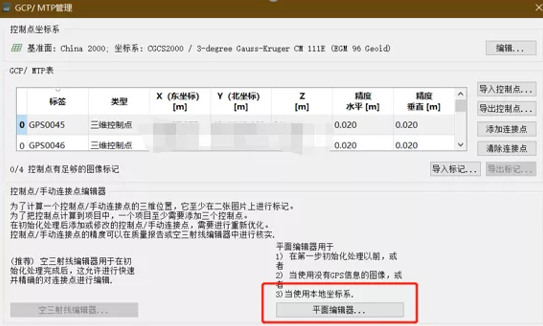
点击平面编辑器,出现如下界面:
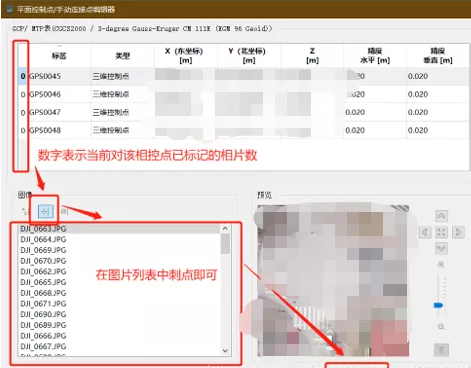
特别注意:同一个像控点要至少在5张照片中完成刺点。
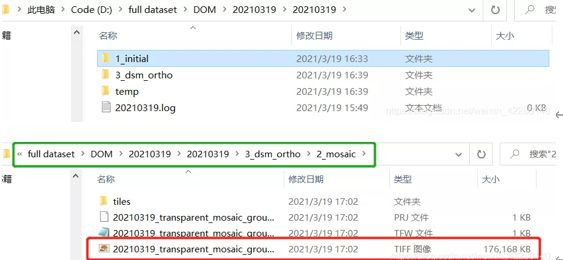
8.2.11 生成结果查看
在相应路径下找到生成的Tif图像。
8.3三维模型成果生产(以ContextCapture为例)
8.3.1 数据准备
ContextCapture软件跑空三、模型需要提供原始影像、POS数据、控制点坐标和控制点点之记相片。

8.3.2 新建工程
双击打开软件,点击“新建工程”,出现项目管理界面,填写项目名称,并设置保存路径,下方创建“新区块”勾上,点击“OK”确定,即新建工程成功,工程命名和项目路径不得出现中文字符和非法字符。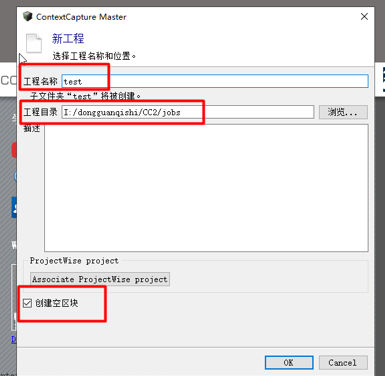
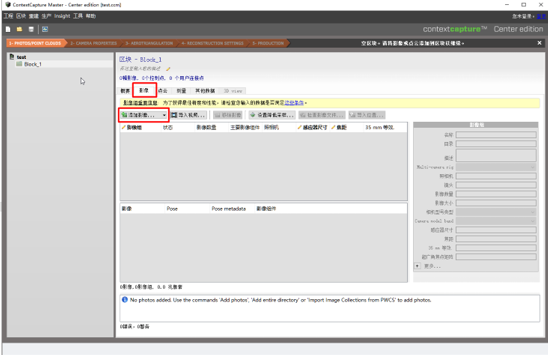
8.3.3 导入影像
进入“Photos”影像编辑界面,点击“影像”添加影像,选择准备好的影像文件,全部选中即可。
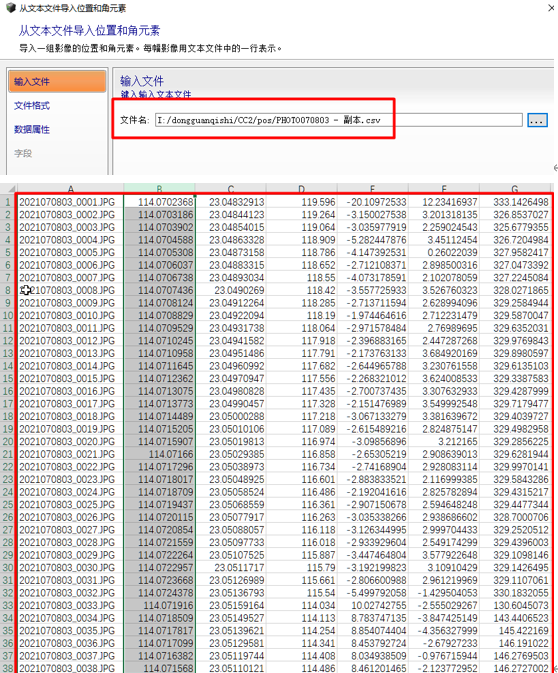
8.3.4 导入POS
手动输入每个镜头对应的焦距,双击即可输入更改。点击“导入位置”导入POS数据,选择准备好的“TXT”或“CSV”格式的POS数据导入即可。
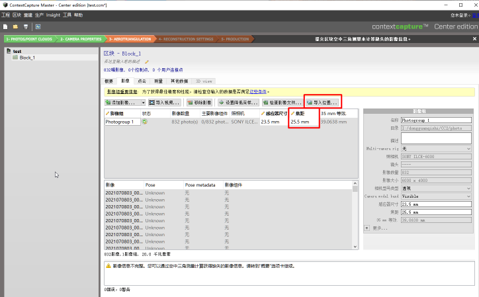
导入POS后,添加POS数据分隔符,选择“逗号”;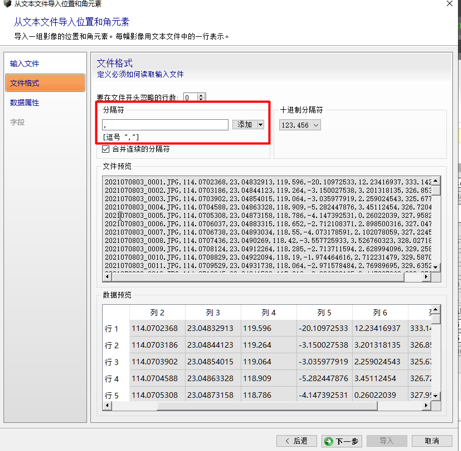
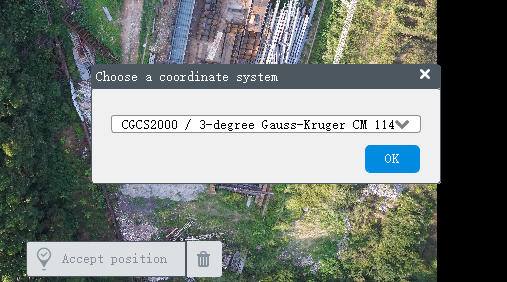
选择POS数据相对应的坐标系;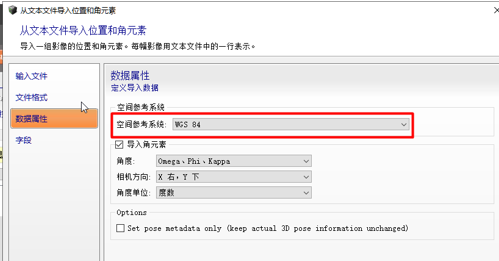
将像片名、经度、纬度、海拔高度、角度元素和每列对应好。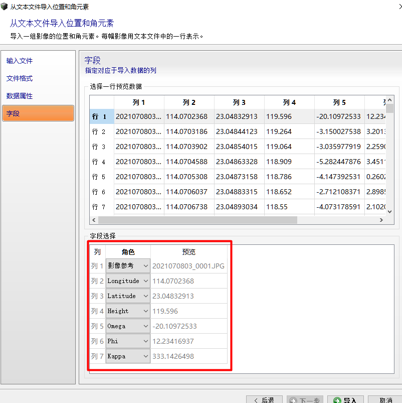
8.3.5 导入控制点
点击“测量”进入控制点编辑界面,点击“添加控制点”,选择控制点文件,选择成果坐标系和中央子午线。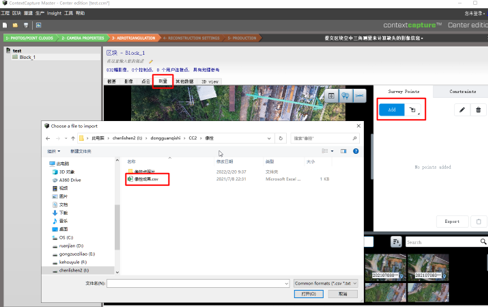
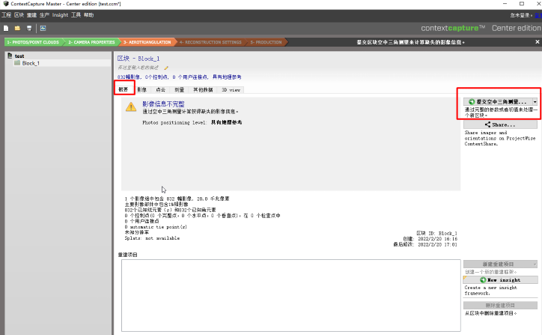
8.3.6 空三提交
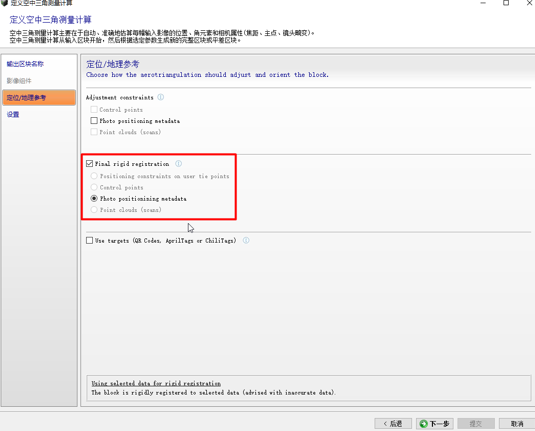
进入“概要”界面,点击“提交空中三角测量”,选择“使用精确POS信息”进行空三处理。
8.3.7 刺点
空三完成后,回到控制点编辑界面,选择要编辑的控制点,每一个控制点在下方照片栏内任意选择6-8张像片进行刺点,刺点按住“Shift”键+“鼠标左键”,点击控制点点位位置。
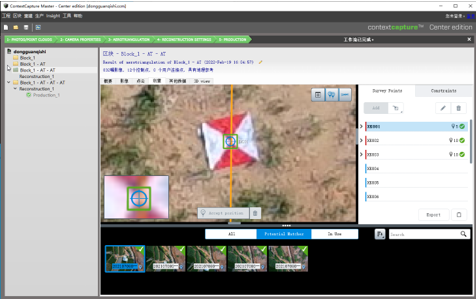
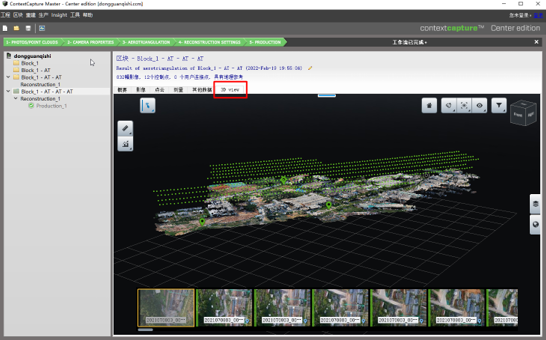
刺完所有像控点后,回到概要界面,按上述步骤重新提交一次空三,空三完成后,界面切换到3D视图,确认空三没有问题,即可进行模型提交生产。
8.3.8 模型生产参数设置
回到概要界面,点击提交模型,到模型参数设置界面,选择好相对应坐标系,在“处理设置”里面的“孔洞填充”选择“填充除瓦片边界处以外的所有孔洞”。在“空间框架设置”里选择“规则平面网格切块”,设置好分块大小,每个分块应不大于电脑单个内存条大小,最后设置所需生产模型的范围.选择刚才生成的模型工程,点击提交新的产品,选择生成“三维网格”。
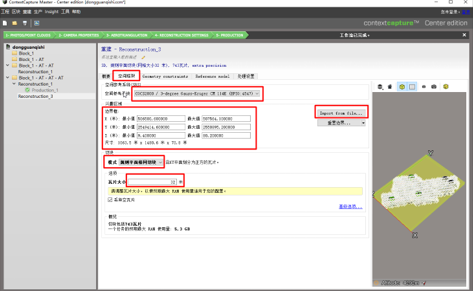


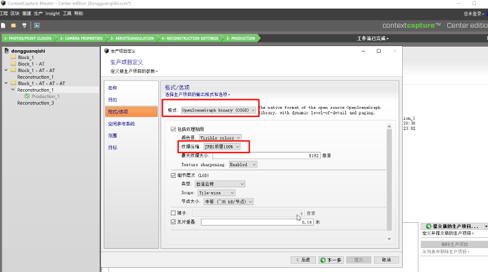
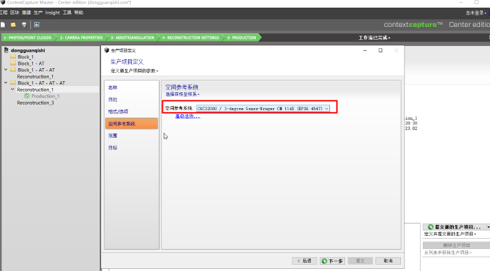
8.3.9 模型格式、坐标系选择
选择模型格式为“OSGB”,质量选择100%,其他默认即可;选择成果坐标系。
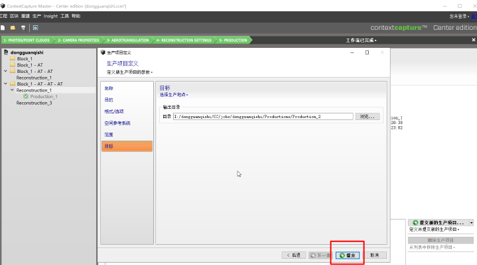
8.3.10 提交模型
直接下一步,模型已提交,打开引擎即可。
附件1:像控点点位信息表
像控点点位信息表
| 点号 | 所在图幅号 | ||||||
| 刺点者 | 检查者 | 日期 | |||||
| 坐标 | X(m) | Y(m) | H(m) | ||||
| 概略点位图 | 像控点位置详图 | ||||||
| 像控点实地照片 | |||||||
| 点位说明 | |||||||
| 备注 | 坐标系统:
高程基准: |
||||||
附件2:像控点成果表
像控点成果表
工程名称:
| 序号 | 点名 | X(m) | Y(m) | H(m) | 备注 |
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| 6 | |||||
| 7 | |||||
| 8 | |||||
| 9 | |||||
| 10 | |||||
| 11 | |||||
| 12 | |||||
| 13 | |||||
| 14 | |||||
| 15 | |||||
| 16 | |||||
| 17 | |||||
| 18 | |||||
| 19 | |||||
| 20 | |||||
| 坐标系统:
高程基准: |
|||||
制表者: 校核者: 日期 : 年 月 日
文章末尾固定信息

评论